All information relevant to my publication track record can also be found on my google scholar profile
Invited Talks
IEEE World Haptics Conference (WHC) 2021 - Cross Cutting Challenge Touchless AI interfaces for functional and non-functional haptics
Bringing Contacless Tactile Interaction to Immersive Virtual Reality A short invited talk on the topic of scientific and technological challenges for effectively integrating ultrasound mid-air tactile feedback into immersive VR experiences. The talk covers questions of device integration into the VR ecosystem, perception, rendering algorithms and interaction techniques based on this novel haptic feedback technology.
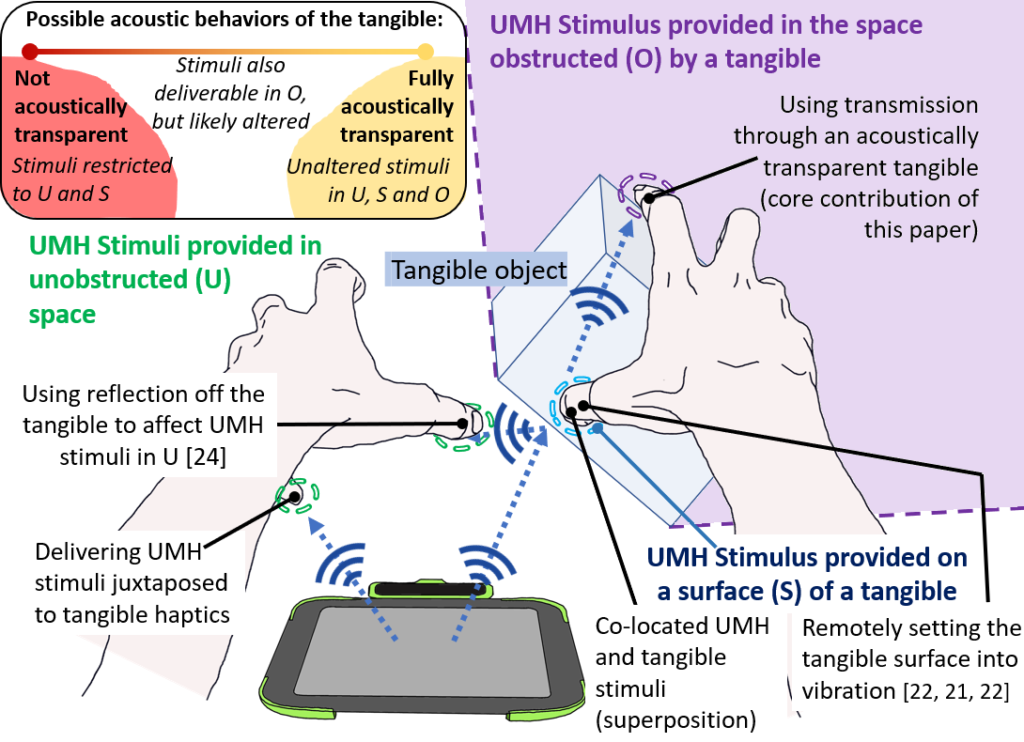
Can we effectively combine tangibles and ultrasound mid-air haptics?
A study of acoustically transparent tangible surfaces
Transactions on Haptics, 2023
Howard, T., Gicquel, G., Pacchierotti, C., Marchal, M.
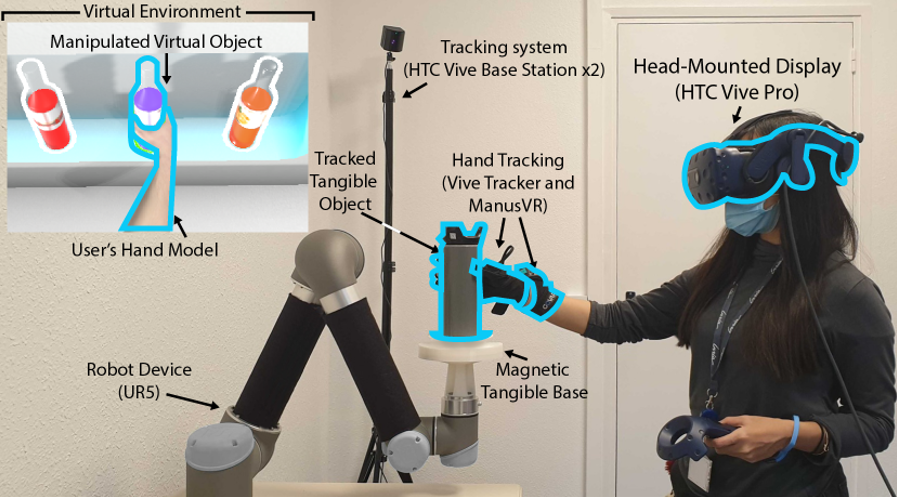
We study the combination of tangible haptic objects and ultrasound mid-air haptics, two haptic feedback paradigms that ensure the user remains unconstrained and unencumbered by haptic devices. We highlight how the strengths and weaknesses of both approaches are highly complementary, discuss the design space for combining both technologies and perform experimental investigations into the use of ultrasound haptic stimuli delivered through acoustically transparent tangible surfaces.
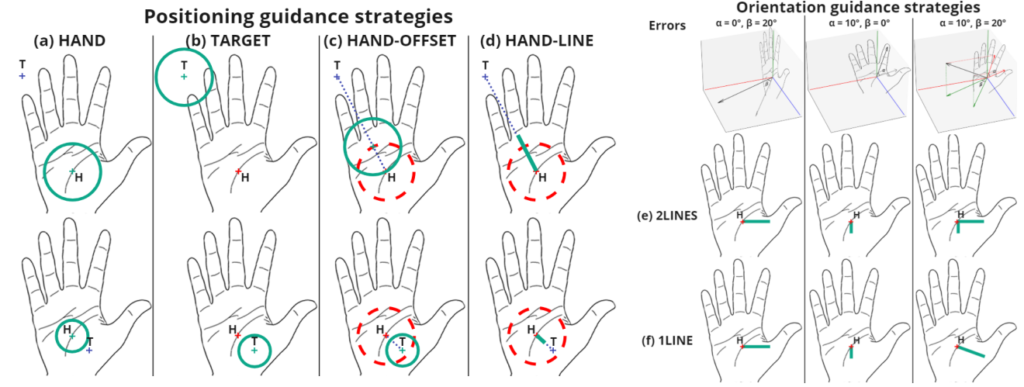
Ultrasound Mid-Air Haptics for Hand Guidance in Virtual Reality
Transactions on Haptics, 2023
Mulot, M., Howard, T., Pacchierotti, C., Marchal, M.
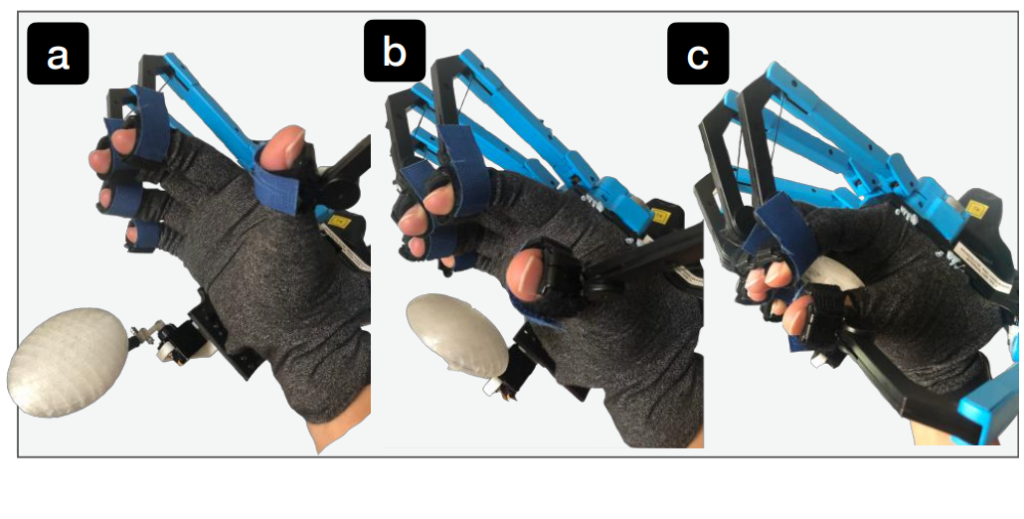
PalmEx: Adding Palmar Force-Feedback for 3D Manipulation with Haptic Exoskeleton Gloves
Transactions on Visualization and Computer Graphics, 2023
Bouzbib, E., Teyssier, M., Howard, T., Pacchierotti, C., Lécuyer, A.
We propose to extend the haptic feedback capabilities of exoskeleton force-feedback gloves by adding encounter-type palmar contact haptic feedback. We combine a SenseGlove DK1 with a custom-built attachement inspired by the WeATaViX wearable ETHD and perform a preliminary technical and user evaluation showing that palmar contact is beneficial to 3D object manipulation.
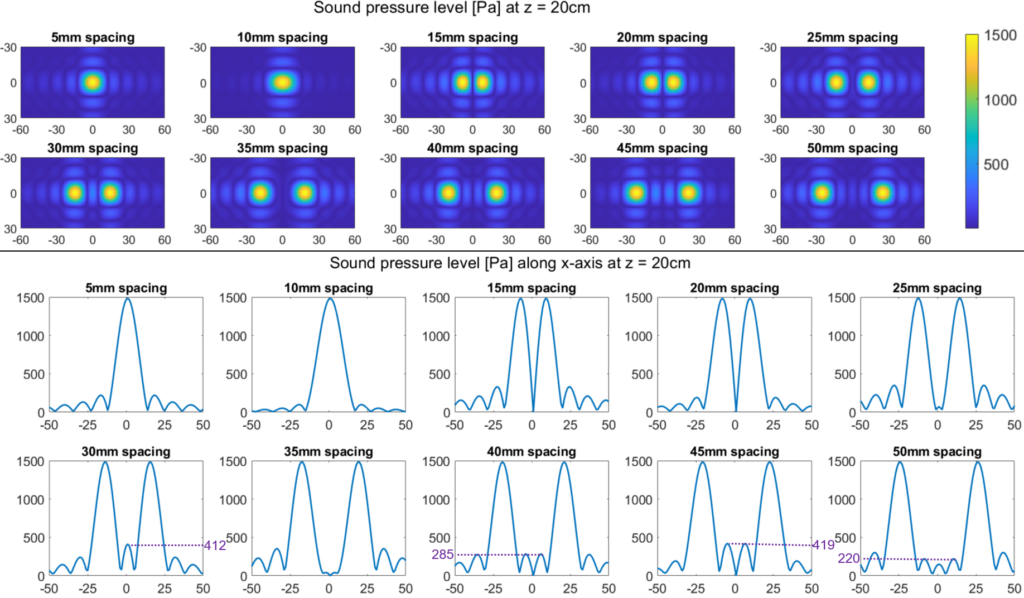
Gap Detection in Pairs of Ultrasound Mid-Air Vibrotactile Stimuli Transactions on Applied Perception, 2022
Howard, T., Kirk Driller, K., Frier, W., Pacchierotti, C., Marchal, M., Hartcher-O’Brien, J.
A psychophysics study on the perception of continuity or discontinuity in mid-air tactile patterns as a function of spacing between neighboring focal points. We investigate the physical interactions between neighboring focal points and derive hypotheses regarding the perceived size of a focal point as well as guidelines for rendering continuous or discontinuous ultrasound mid-air tactile patterns.
Manifesto for Digital Social Touch in Crisis Frontiers in Computer Science, 2021
Jewitt, C., Price, S., Steimle, J., Huisman, G., Golmohammadi, L., Pourjafarian, N., Frier, W., Howard, T., Askari, S.I., Ornati, M., Panëels, S. & Weda, J.
Resulting from a collaborative effort started at Eurohaptics 2020, this paper presents a Manifesto for Digital Social Touch in Crisis-a provocative call to action to designers, developers and researchers to rethink and reimagine touch through a deeper engagement with the social and sensory aspects of touch.
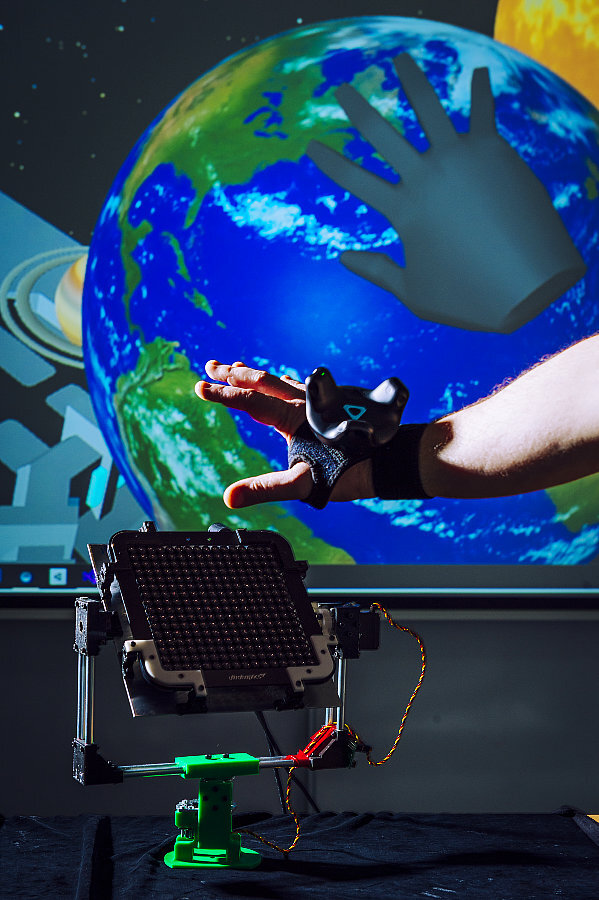
PUMAH: Pan-Tilt Mid-Air Ultrasound Haptics for larger interaction workspace in virtual reality IEEE Transactions on Haptic, 2020
Howard, T., Maud Marchal, M., Lécuyer, A., Pacchierotti, C.
In this paper, we propose a 2DoF actuated mount for ultrasound mid-air tactile interfaces which enables better integration into 3D interactions in VR, by providing a 14-fold increase in rendering workspace and enabling multi-directional tactile feedback. More information on the device itself can be found on the PUMAH project page.
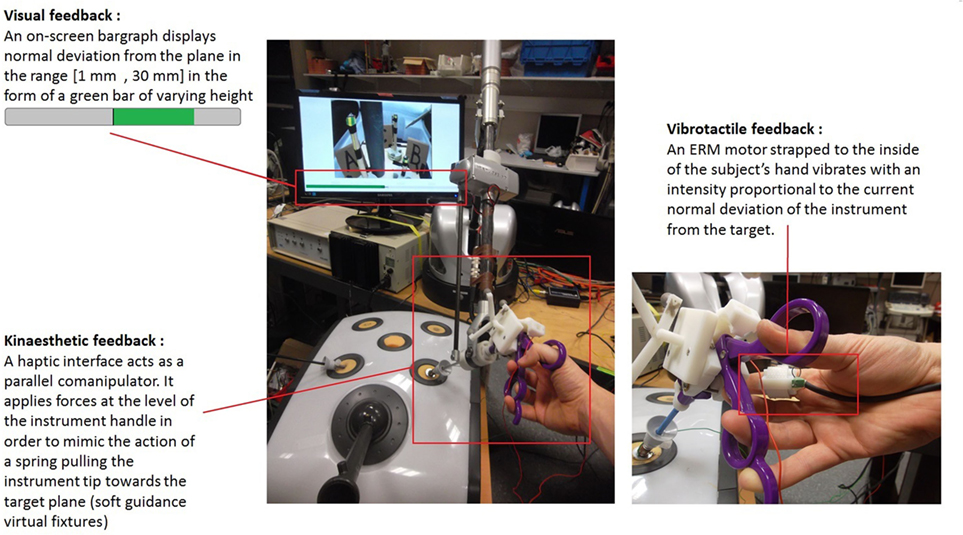
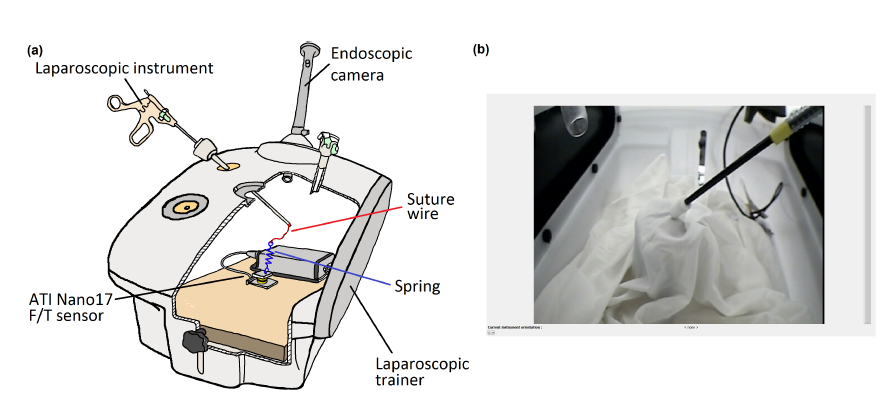
Improving Precision in Navigating Laparoscopic Surgery Instruments towards a Planar Target Using Haptic and Visual Feedback Frontiers in Robotics & AI, 2016
Howard, T. & Szewczyk, J.
In this paper, we investigate the relative effectiveness of vibrotactile, kinesthetic and visual feedback in assisting intra-corporeal navigation of laparoscopic surgery instruments.
Ultrasound Mid-Air Haptic Feedback for Immersive Virtual Reality Interaction
Howard, T., Marchal, M., Pacchierotti, C.
in Ultrasound Mid-Air Haptic Displays and Novel HCI Applications, Springer Human-Computer Interaction Series Publication currently pending
In this chapter, we examine the scientific and technological challenges inherent to the integration of ultrasound mid-air haptic displays in immersive Virtual Reality (VR) interactions through the lens of work conducted in the scope of the H-Reality FET-Open H2020 European project. The chapter covers the integration of ultrasound mid-air haptic devices into the VR ecosystem, perception of mid-air tactile stimuli and rendering for VR applications.
Perception of spatialized vibrotactile impacts in a hand-held tangible
Cabaret, P.-A., Howard, T., Pacchierotti., C., Babel, M., Marchal, M. in Proc. Eurohaptics 2022 (publication pending)
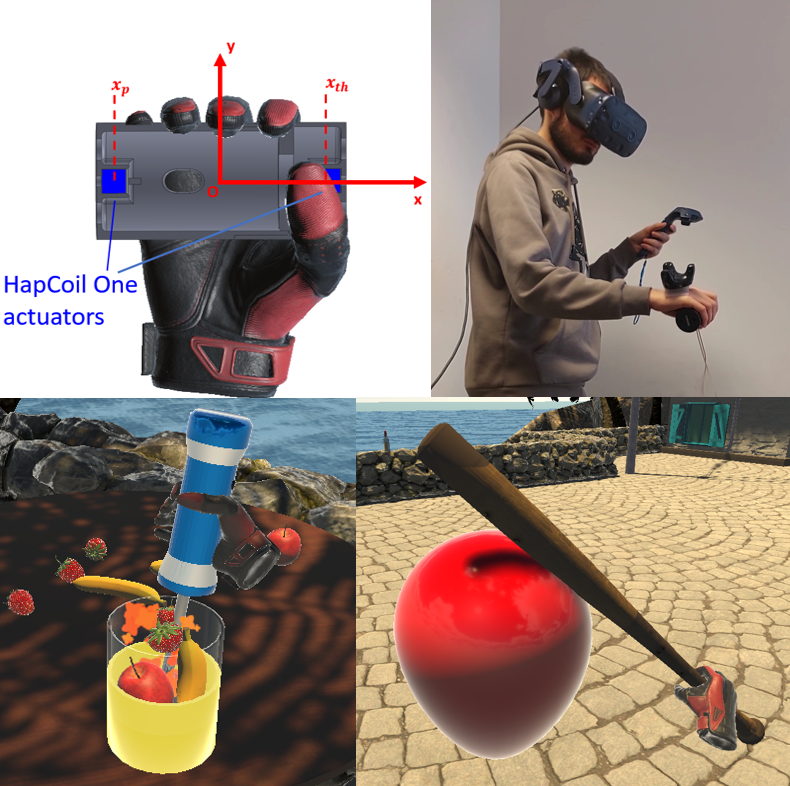
Here, we conduct a preliminary investigation into the use of simplified exponentially decaying sinusoïd models of impact vibrations to render impacts between a freely manipulable handheld virtual object and the virtual environment. A tangible handle is used as the physical counterpart to the manipulated virtual object. It contains a pair of vibrotactors allowing spatialized rendering of virtual impact.
DOLPHIN: A framework for the design and perceptual evaluation of ultrasound mid-air haptic stimuli
Mulot, M., Gicquel, G., Zanini, Q., Frier, W., Marchal, M., Pacchierotti, C., Howard, T. in Proc. ACM Symposium on Applied Perception (SAP) 2021
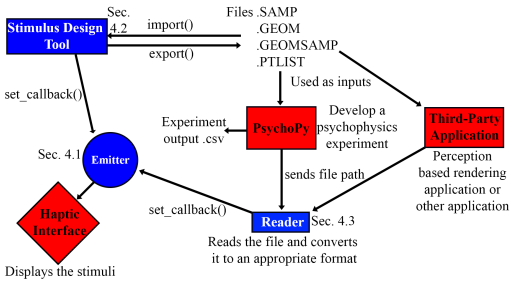
This paper presents Dolphin, a software framework intended to assist in designing and systematically varying parameters of mid-air haptic stimuli. The generated stimuli can interface with 3rd party applications for rendering purposes, as well as with PsychoPy in order to enable psychophysical investigation of mid-air haptic stimuli. We show a proof-of-concept by using the tool to investigate perception of curvature in mid-air haptics.
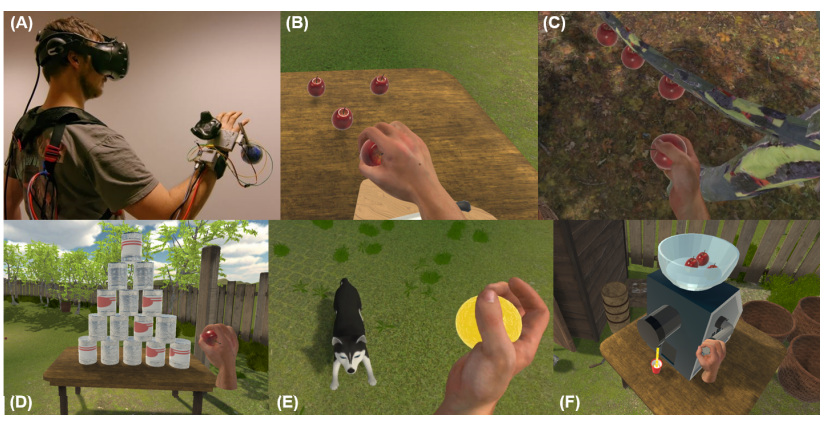
Alfred: The haptic butler - On-demand tangibles for object manipulation in virtual reality using an ETHD
Mercado, V.*, Howard, T.*, Si-Mohammed Hakim, Argelaguet, F., Lécuyer, A. in Proc. IEEE World Haptics Conference (WHC) 2021
In this paper, we investigate VR object manipulation interactions supported by an ETHD presenting a detachable tangible object to the user at any desired location. This approach enables free reconfiguration of tangible counterparts to virtual environments, remapping of a single tangible object to multiple virtual objects and interactions involving free spawning and removal of virtual objects which always have a physical counterpart.
WeATaViX: Wearable Actuated Tangibles for Virtual Reality Experiences
de Tinguy, X.*, Howard, T.*, Pacchierotti, C., Marchal, M., Lécuyer, A. in Proc. Eurohaptics 2021
This paper presents the WeATaViX, a prototype of a novel approach to encounter-type haptics, wherein the user wears an ETHD capable of bringing a tangible object in and out of their hand as they touch, grasp and release virtual objects. The device is designed to be highly wearable thanks to an adhesive silicone attachment to the back of the hand and lightweight design. More information about the device and subsequent design iterations can be found on the Weety project page.
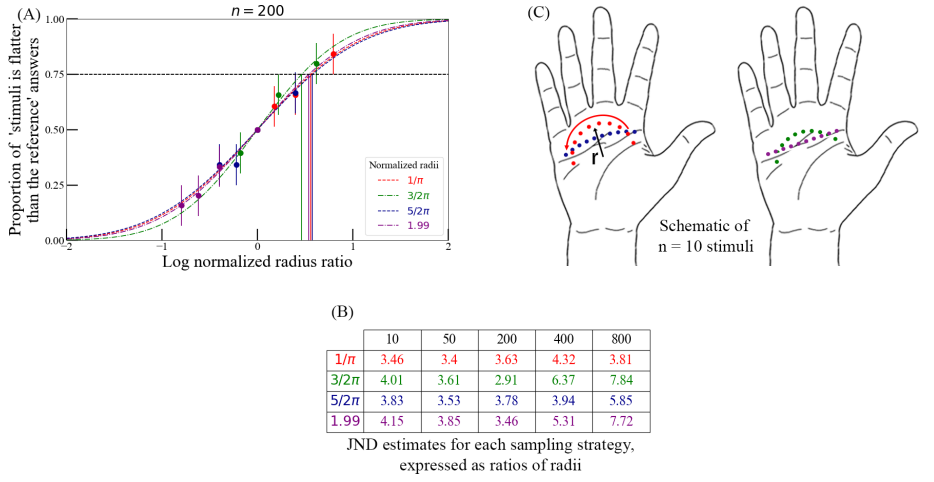
Investigating the recognition of local shapes using mid-air ultrasound haptics
Howard, T., Gallagher, G., Lécuyer, A., Pacchierotti, C., Marchal, M. in Proc. IEEE World Haptics Conference (WHC) 2019
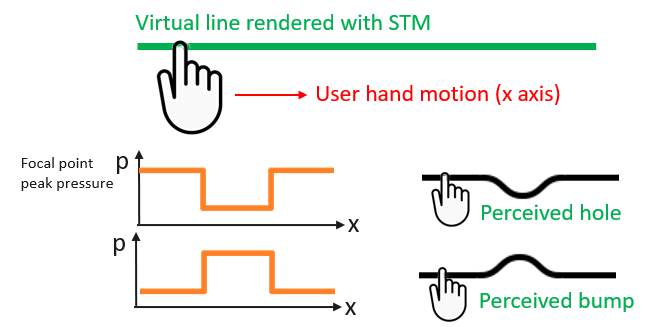
In this paper, we investigate detection and identification thresholds for amplitude- (AM) and spatiotemporally-modulated (STM) mid-air haptic stimuli. We go on to present an original approach for rendering changes in height of mid-air haptic shapes above the array, by modulating the focal point intensity along a STM path.
Assisting control of forces in laparoscopic surgery using tactile and visual sensory susbstitution
Howard, T., Szewczyk, J. in Proc. New Trends in Medical & Service Robotics (MESROB) 2016
In this paper, we examine how various forms of visual and vibrotactile feedback may assist a surgeon in precisely controlling forces applied to a suture thread during laparoscopic surgery.
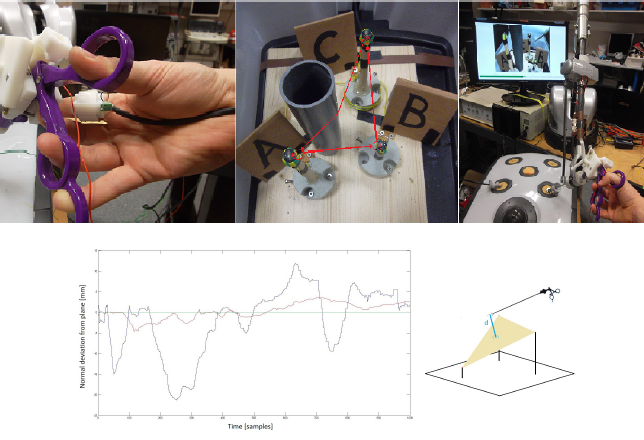
Haptic and visuo-haptic feedback for guiding laparoscopic surgery gestures
Howard, T., Szewczyk, J. in Computer-Assisted Radiology & Surgery Congress (CARS) 2015
Here, we further examine how visual, vibrotactile and kinesthetic feedback during an endoscopic instrument navigation task improve accuracy of instrument tip movements. Data from novice subjects are compared to the performance of an experienced surgeon intern, highlighting key differences in the potential for these types of feedback depending on user experience at the task.
Visuo-haptic feedback for 1D guidance in laparoscopic surgery
Howard, T., Szewczyk, J. in Proc. IEEE Biomedical Robotics & Biomechatronics (BioRob) 2014
This paper examines how visual, vibrotactile and kinesthetic feedback and their combinations improve accuracy of instrument tip movements during an endoscopic instrument navigation task. Results show vibrotactile feedback may be a promising low-cost and unobstructive alternative to conventional visual feedback in computer-assisted laparoscopic surgery.
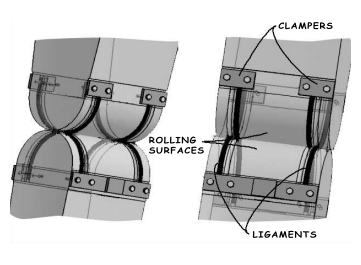
Optimized design for the knee structure of a humanoid robot
Howard, T., Berviller, L., Zattarin, P., Abba, G. in Proc. ASME 11th Biennial Conference on Engineering Systems Design and Analysis 2012
This contribution focuses on the actuation design for a novel knee architecture of a humanoid robot. Inspired by the structure of a human knee, the presented design minimizes rolling friction in the joint by increasing the curvature radii of the rolling elements. We present and theoretically evaluate multiple solutions for actuating such a knee mechanism.
Semi-autonomous flying robot for physical interaction with environment
Albers, A., Trautmann, S., Howard, T., Nguyen, T.A., Frietsch, M., Sauter, C. in Proc. IEEE Conference on Robotics, Automation and Mechatronics (CIS-RAM) 2010
This paper presents initial results on the development of a UAV capable of applying force to a wall while maintaining flight stability. The basis for the work presented is a quadrotor system which is stabilized with an inertial measurement unit. As a new approach an additional actuator was added to generate forces during physical contact as the UAV stays horizontal. System performances are demonstrated by several flight tests.
WeATaViX: Wearable Actuated Tangibles for Virtual Reality Experiences
Howard, T., de Tinguy, X., Gicquel, G., Marchal, M., Lécuyer, A., Pacchierotti, C. in Eurohaptics Hands-on Demonstrations 2022
A demo of an improved hardware design for the WeATaViX, based on the same VR interaction as demonstrated at WHC 2021. The in-person demo provided the opportunity for audiences of the 2021 World Haptics Conference (held remotely) to test the interaction. We also presented a new iteration of the hardware design, using a fully 3d printed tangible end-effector and conductive ink-based capacitive sensing. More information about the device and software can be found on the Weety project page.
Curvature Discrimination for Dynamic Ultrasound Mid-Air Haptic Stimuli
Mulot, M., Gicquel, G., Frier, W., Marchal, M., Pacchierotti, C., Howard, T. in Proc. IEEE World Haptics Conference (WHC) Work-in-progress papers (WIP) 2021
This paper presents preliminary results on curvature discrimination for dynamic tactile pointer stimuli delivered through an ultrasound mid-air haptic interface.
WeATaViX: Wearable Actuated Tangibles for Virtual Reality Experiences
Howard, T., de Tinguy, X., Gicquel, G., Marchal, M., Lécuyer, A., Pacchierotti, C. in Proc. IEEE World Haptics Conference (WHC) Hands-on Demonstrations 2021
A demo of the second version of the WeATaViX, with an improved mechanical design and fully reworked interaction mechanism. It showcases how a single tangible end-effector can be used convincingly interact with multiple different types of objects in a VR scene, so long as their dimensions remain sufficiently similar. More information about the device and software can be found on the Weety project page.
3-Dexterity: Finding your place in a 3-armed world
Audinot, A., Dewez, D., Fouché, G., Fribourg, R., Howard, T., Lécuyer, F., Luong, T., Mercado, V., Reuzeau, A., Rinnert, T., Vailland, G., Argelaguet, F. in IEEE Virtual Reality (VR) 3D User Interface Contest 2020
In the context of the IEEE VR 2020 3DUI Contest entitled “Embodiment for the Difference”, this paper presents a VR application to highlight the challenges that people with physical disabilities face on their daily life. Two-armed users are placed in a world where people normally have three arms, making them effectively physically disabled. The scenario takes the user through the process of struggling with everyday interactions (designed for humans with three arms), then receiving a third arm prosthesis and thus recovering some level of autonomy. The experience is intended to generate a sense of difference and empathy for physically disabled persons.
WeATaViX: Wearable Actuated Tangibles for Virtual Reality Experiences
Howard, T., de Tinguy, X., Gicquel, G., Marchal, M., Lécuyer, A., Pacchierotti, C. in Eurohaptics Hands-on Demonstrations 2020
A demo of the first version of the WeATaViX VR interaction. It showcases how the wearable ETHD canprovide physical counterparts to an arbitrarily large number of identical virtual objects, anywhere in the VR workspace. More information about the device and software can be found on the Weety project page.
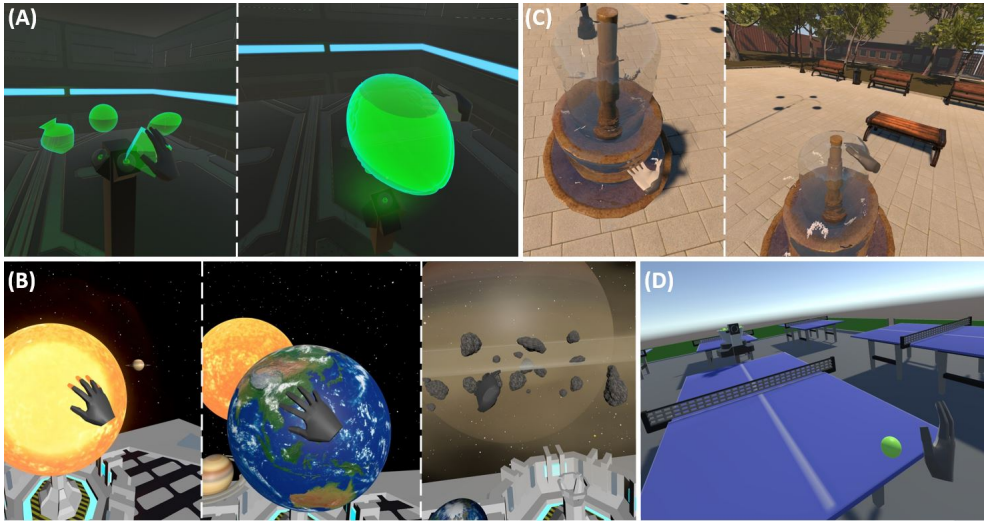
Pyramid Escape: Design of Novel Passive Haptics Interactions for an Immersive and Modular Scenario
Brument, H., Fribourg, R., Gallagher, G., Howard, T., Lécuyer, F., Luong, T., Mercado, V., Peillard, E., de Tinguy, X., Marchal, M. in IEEE Virtual Reality (VR) 3D User Interface Contest 2019
In this paper, we present the design of ten different 3D user interactions using passive haptics and embedded in an escape game scenario in which users have to escape from a pyramid in a limited time. Our solution is innovative by its modularity, allowing interactions with virtual objects using tangible props manipulated either directly using the hands and feet or indirectly through a single prop held in the hand, in order to perform several interactions with the virtual environment (VE). We also propose a navigation technique based on the “impossible spaces” design, allowing users to naturally walk through several overlapping rooms of the VE. All together, our different interaction techniques allow the users to solve several enigmas built into a challenging scenario inside a pyramid.