Design tool for investivating the perception of ultrasound mid-air haptic stimuli
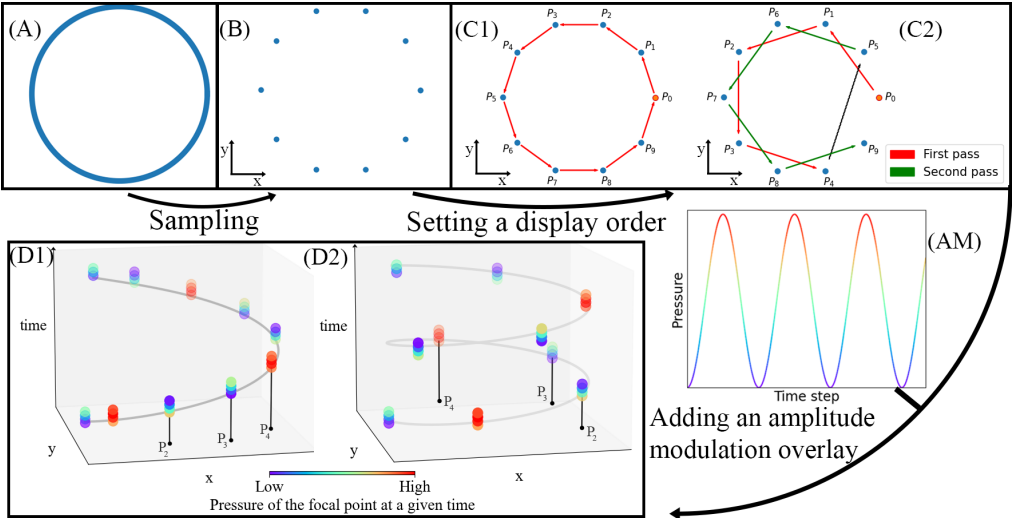
Dolphin is an open-source software simplifying the design of ultrasound mid-air tactile stimuli. Starting with definitions of the abstract geometric shapes of the stimuli, Dolphin guides the user through every step of the spatial and temporal sampling so as to achieve the desired complex spatiotemporal behavior of the stimulus. Dolphin is designed to easily interface with PsychoPy to easily enable perception studies to be run using the designed stimuli.
Dolphin is still a work-in-progress, currently supporting the rendering of 2D shapes using Ultraleap devices. Development to make it fully hardware-agnostic and to support a wider range of rendering options (multiple workflows, 3D shapes) is ongoing.
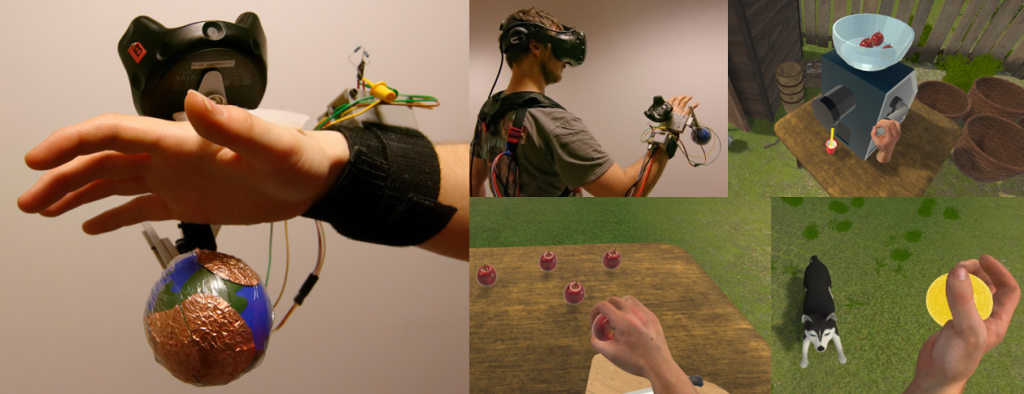
The WEETY (WEarable Encouter-TYpe) family of devices is a collection of devices enabling on-demand encounter-type haptic interactions in arbitrarily large workspaces by letting the user wear the device. The currently available prototype enables full-hand grasping of tangible objects brought in and out of a user’s hand, as the user grasps, manipulates and releases virtual objects. The project page contains full hardware designs as well as a unity asset enabling rapid integration into custom VR scenes, along with a few demo scenes.
Robotic platform for bringing ultrasound mid-air haptics to VR
The PUMAH is a 2DoF pan and tilt mount for ultrasound mid-air haptic interfaces. By rotating the phased array, it enables tactile feedback to be provided in a significantly larger volume than is the case for a static array, at negligible added cost, complexity and power draw. The project page contains the hardware designs taylored to the Ultraleap Stratos Explore array, however the design can easily be modified to fit different array geometries. A Unity asset enables quick integration into VR applications or other Unity projects.